CAN
CAN (Controller Area Network) is a multi-master serial communication bus. The basic design specification requires a high bit rate, high immunity to electromagnetic interference, and the ability to detect any errors that occur. When the signal transmission distance reaches 10 km, CAN-bus can still provide a data transmission rate of up to 5Kbps.
Data Frame Format

- SOF: The single dominant start of frame (SOF) bit marks the start of a message and is used to synchronize the nodes on a bus after being idle.
- Identifier: The Standard CAN 11-bit identifier establishes the priority of the message. The lower the binary value, the higher its priority.
- RTR: The single remote transmission request (RTR) bit is dominant when information is required from another node. All nodes receive the request, but the identifier - determines the specified node. The responding data is also received by all nodes and used by any node interested. In this way, all data being used in a system is uniform.
- IDE: A dominant single identifier extension (IDE) bit means that a standard CAN identifier with no extension is being transmitted.
- r0: Reserved bit (for possible use by future standard amendment).
- DLC: The 4-bit data length code (DLC) contains the number of bytes of data being transmitted.
- Data: Up to 64 bits of application data may be transmitted.
- CRC: The 16-bit (15 bits plus delimiter) cyclic redundancy check (CRC) contains the checksum (number of bits transmitted) of the preceding application data for error - detection.
- ACK: Every node receiving an accurate message overwrites this recessive bit in the original message with a dominate bit, indicating an error-free message has been sent.
- EOF: This end-of-frame (EOF), 7-bit field marks the end of a CAN frame (message) and disables bitstuffing, indicating a stuffing error when dominant. When 5 bits of the same logic level occur in succession during normal operation, a bit of the opposite logic level is stuffed into the data.
- IFS: This 7-bit interframe space (IFS) contains the time required by the controller to move a correctly received frame to its proper position in a message buffer area.
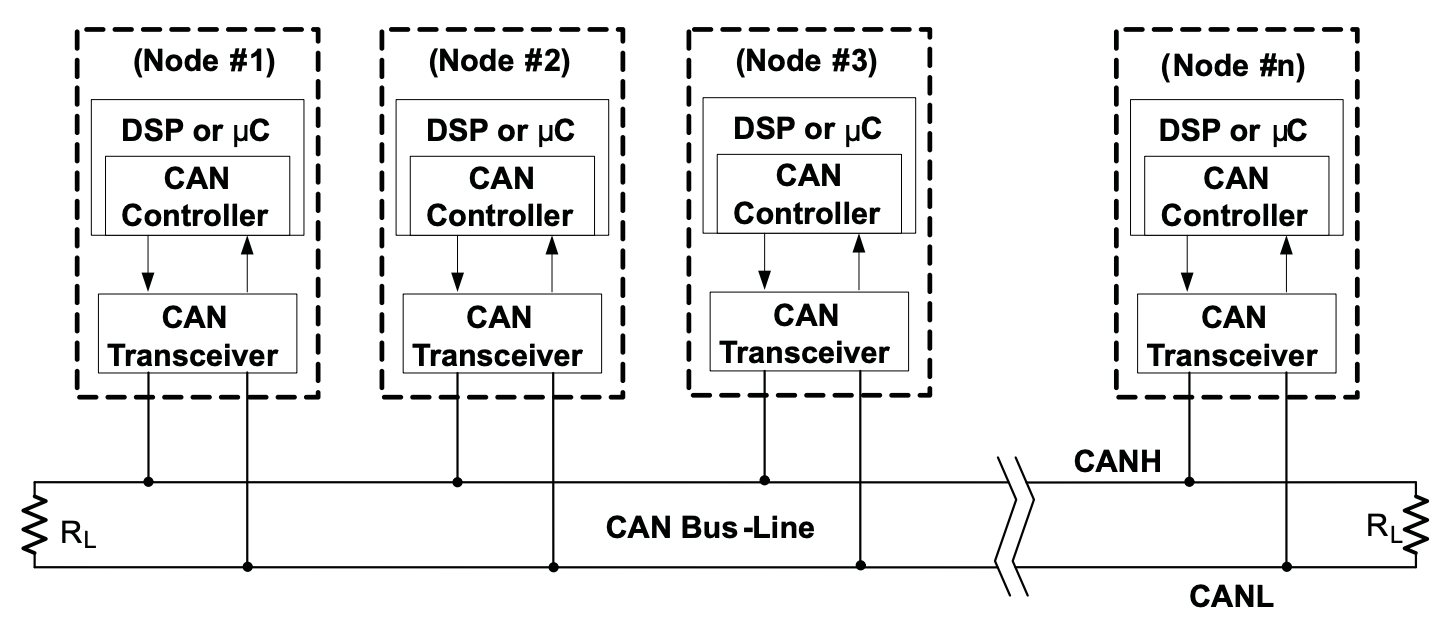
CAN Bus